Dog Cat Dual Classification
2021-04-25 10:18
import cv2
from matplotlib import pyplot as plt
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader
import torchvision
from torchvision import transforms
from torchvision.datasets import ImageFolder
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Resize([128, 128]),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)),
])
train_folder = ImageFolder(root='./cat_dog/training_set',
transform = transform)
test_folder = ImageFolder(root='./cat_dog/test_set',
transform = transform)
train_loader = DataLoader(train_folder,
batch_size = 100,
shuffle = True)
test_loader = DataLoader(test_folder,
batch_size = 100,
shuffle = True)
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.cal = nn.Sequential(
nn.Conv2d(in_channels = 3,
out_channels = 8,
kernel_size = 3,
stride = 1,
padding = 1,
bias = False),
nn.ReLU(),
nn.Conv2d(in_channels = 8,
out_channels = 8,
kernel_size = 3,
stride = 1,
padding = 1,
bias = False),
nn.ReLU(),
nn.MaxPool2d((2, 2), 2, 0),
nn.ReLU(),
nn.Flatten(),
nn.Linear(64*64*8, 1000),
nn.ReLU(),
#nn.Linear(1000, 1000),
#nn.ReLU(),
nn.Linear(1000, 2),
nn.Softmax(dim = 1),
)
def forward(self, x):
return self.cal(x)
net = Net().cuda()
torch.cuda.empty_cache()
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
print('Using: ', device)
if not (device == 'cpu'):
net.to(device)
optimizer = torch.optim.SGD(net.parameters(), lr = 0.01)
loss_func = nn.CrossEntropyLoss()
epochs = 50
epoch_loss = []
for epoch in range(epochs):
running_loss = 0.0
for i, (inputs, labels) in enumerate(train_loader):
# inputs [100, 3, 128, 128]
# labels [100]
if not (device == 'cpu'):
inputs, labels = data[0].to(device),data[1].to(device)
else:
inputs, labels = data
# y_hats [100, 2]
y_hats = net(inputs)
# labels [100, 1]
# labels = labels.unsqueeze(1).type_as(y_hats)
loss = loss_func(y_hats, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
running_loss += loss.item()
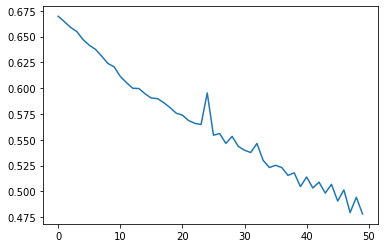
epoch_loss.append(running_loss / (i+1))
print('epoch %d, loss: %.3f' % (epoch, running_loss/(i+1)))
epoch 0, loss: 0.670
epoch 1, loss: 0.664
epoch 2, loss: 0.659
epoch 3, loss: 0.655
epoch 4, loss: 0.647
epoch 5, loss: 0.642
epoch 6, loss: 0.638
epoch 7, loss: 0.631
epoch 8, loss: 0.624
epoch 9, loss: 0.621
epoch 10, loss: 0.611
epoch 11, loss: 0.605
epoch 12, loss: 0.600
epoch 13, loss: 0.600
epoch 14, loss: 0.595
epoch 15, loss: 0.590
epoch 16, loss: 0.590
epoch 17, loss: 0.586
epoch 18, loss: 0.581
epoch 19, loss: 0.576
epoch 20, loss: 0.574
epoch 21, loss: 0.569
epoch 22, loss: 0.566
epoch 23, loss: 0.565
epoch 24, loss: 0.595
epoch 25, loss: 0.554
epoch 26, loss: 0.556
epoch 27, loss: 0.546
epoch 28, loss: 0.553
epoch 29, loss: 0.544
epoch 30, loss: 0.540
epoch 31, loss: 0.538
epoch 32, loss: 0.546
epoch 33, loss: 0.530
epoch 34, loss: 0.523
epoch 35, loss: 0.525
epoch 36, loss: 0.523
epoch 37, loss: 0.516
epoch 38, loss: 0.518
epoch 39, loss: 0.505
epoch 40, loss: 0.514
epoch 41, loss: 0.503
epoch 42, loss: 0.509
epoch 43, loss: 0.498
epoch 44, loss: 0.507
epoch 45, loss: 0.491
epoch 46, loss: 0.501
epoch 47, loss: 0.480
epoch 48, loss: 0.494
epoch 49, loss: 0.478
# save the model
model_path = './caog_net.pkl'
torch.save(net.state_dict(), model_path)
# load the model
net.load_state_dict(torch.load(model_path))